Physical objects
TIP
It takes about 5 minutes to read this article.
This article provides an overview of how a normal model in the editor becomes a physical object, and the relevant definitions and instructions for physical simulation.
What is a physical object
After the physical simulation of the model is started, the shape, mass, friction, elasticity, etc. property through the calculation of the physics engine, and the real physical motion is simulated in the experience, so as to obtain the world as close to our reality as possible observed results in . In physics simulation, the movement is entirely made up of physics world control object, and the logic layer control only various physics parameter setting and force operation.
How to use physical objects
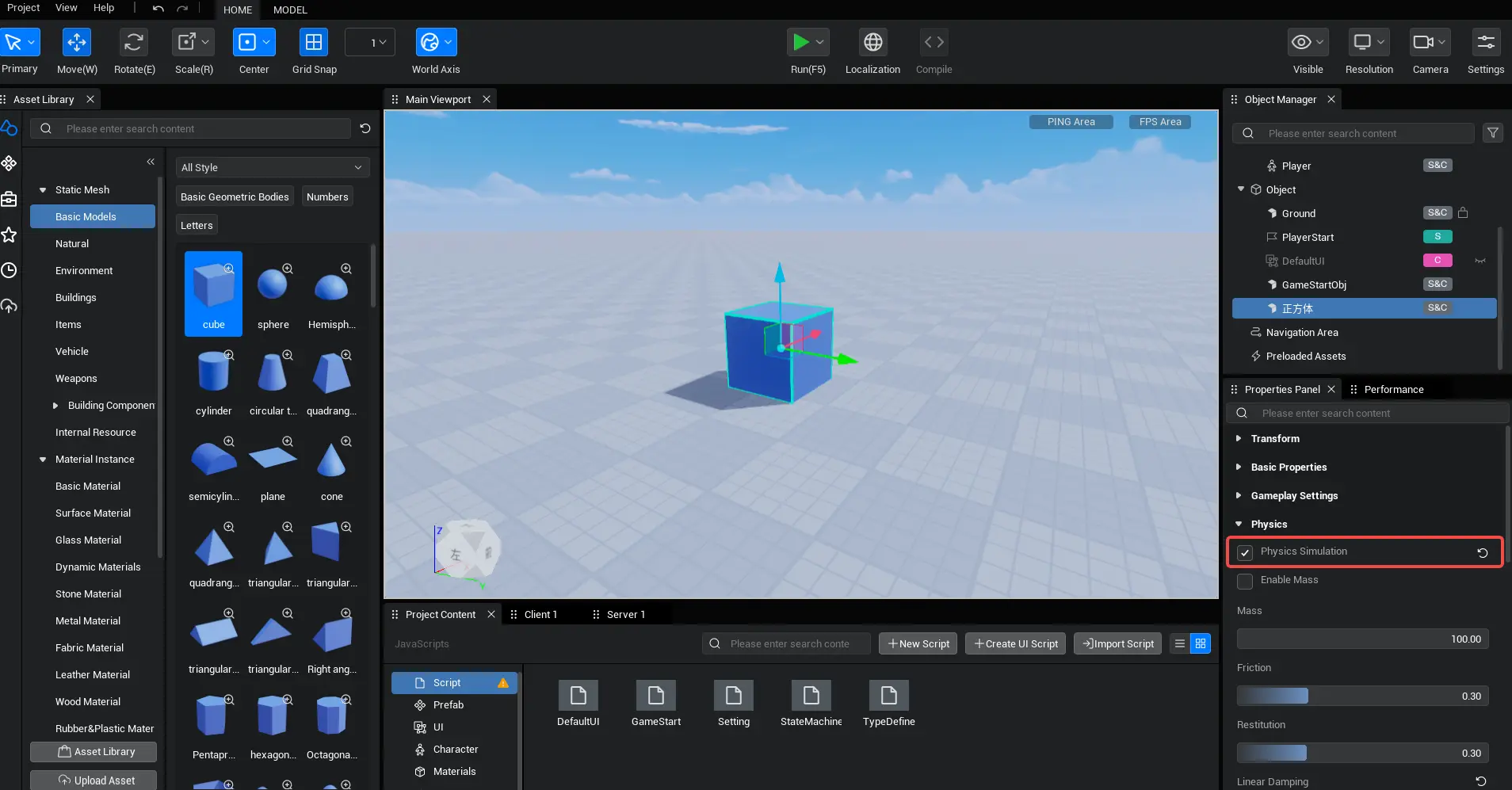
A method that enables physics simulation while editing
create a model in the scene and find the physics simulation in the property panel properties, check to start the physics simulation.
Properties
| Property name | type | Default value | Value range | property description |
|---|---|---|---|---|
| Physics simulation | boolean | false | true/false | Toggles/turns off whether the object is subject to physics simulation calculations |
| use Quality | boolean | false | true/false | open/close the Customize Object Quality parameter, which is used when Customizing Object Quality is turned off Default Quality (KG) |
| quality | number | 100 | 0.001~9999999999 | Set the mass parameters, the more massive the object is the harder it is to push |
| elasticity | number | 0.3 | 0~1 | Setting the elastic force coefficient will cause physics to produce the rebound force after collision. Note: When too much bouncy movement is calculated at the same time, CPU performances will be affected. |
| frictional force | number | 0.3 | 0~1 | Setting the friction coefficient will cause relative resistance between objects and affect the sliding effect of objects. |
| Gravity influences | boolean | true | true/false | open/close whether objects are affected by worlds gravity when physically simulating |
| Linear damping | number | 0.001 | 0~100 | When setting an object to perform linear physics simulation motion, the damping force experienced in motion is an additional "dragging" force to weaken linear movement |
| Angular damping | number | 0.001 | 0~100 | When setting an object to simulate angular physics, the damping force in motion is an additional "dragging" force to weaken angular motion |
| constraint position X | boolean | false | true/false | When the object is physically simulated in motion, it keeps the position in the X axis direction and does not move |
| constraint position Y | boolean | false | true/false | When the object is physically simulated, it keeps the position in the Y axis |
| constraint position Z | boolean | false | true/false | When the object is physically simulated in motion, it maintains the position in the Z axis |
| The constraint rotates X | boolean | false | true/false | When the object is physically simulated in motion, it keeps the position in the X axis |
| Constraint rotation Y | boolean | false | true/false | When the object is physically simulated in motion, it keeps the position in the Y axis |
| Constraint rotation Z | boolean | false | true/false | When the object is physically simulated in motion, it keeps the position in the Z axis |
FYI
At the beginning of the simulation, a linear velocity of 50 damping 50 can slow down the fall of a single object under the initial gravitational force (-980cm/s^2). When multiple physical objects interact with each other (either by using physics constraints or in the event of a collision), the amount of damping required to block the physical object increases.
In the absence of angular damping, the object will continue to rotate until it is affected by an external force, and when the angular damping value is 100, the angular motion caused by the external source can be stopped almost immediately.